一、团队介绍
西北工业大学深圳研究院水下作业机器人创新团队由11人组成,其中教授5人、副教授4人、助理教授2人。团队成员包括中国青年科技奖获得者、国家万人计划青年拔尖人才、国家自然科学基金优秀青年基金获得者、陕西省特支计划领军人才、青年拔尖人才、杰出青年基金获得者、青年科技新星等组成。团队负责人严卫生教授先后担任三型国家重点型号的副总设计师,获国家科技进步奖2次,国家技术发明奖1次;团队骨干崔荣鑫教授担任IEEE Transactions on SMC: Systems以及Journal of Intelligent & Robotic Systems的编委。团队骨干李慧平教授担任IEEE Transactions on Industrial Informatics、ASME Journal of Dynamic Systems, Measurement, and Control、IEEE Access、Cyber-Physic Systems、ACTA Journal on Mechatronic Systems and Control的编委。
水下作业机器人团队紧密围绕国家建设海洋强国战略,针对海洋资源开发与利用、海洋装备检测和维修、水下文化遗产勘探与保护、海洋牧场建设与生物捕捞等需求,着力提高水下作业机器人运动能力和自主能力,重点突破新概念水下作业机器人总体设计、水下自主感知与目标识别、复杂环境下自主决策、目标搜索与运动规划、多模态混合驱动下的运动控制等关键技术,旨在开发出满足市场需求的水下作业型机器人,实现产业化生产,促进我国海洋经济的快速发展,服务国家的海洋强国战略。
二、研究方向、成果
团队长期从事水下水下作业机器人的科学研究和人才培养工作,重点研究新概念水下作业机器人总体设计、水下自主感知与目标识别、复杂环境下自主决策、目标搜索与运动规划、多模态混合驱动下的运动控制等关键技术。
在课题支持方面,团队拥有良好的项目基础支持,能够保障团队创新研究始终瞄准学科前沿,创新工作顺利开展。团队所承担的项目主要涉及水下机器人的目标识别与分类、实时规划与控制优化等多个关键科学问题,团队目前承担的代表性课题包括:
(1)严卫生主持,多运动模态混合型无人水下航行器建模、控制与优化,国家自然科学基金重点项目(61733014),2018-2022年,直接经费290万;
(2)崔荣鑫主持,海陆两栖机器人自主感知与决策关键技术研究,国家自然科学基金和深圳机器人基础中心联合重点基金项目(U1813225),2019-2022年,直接经费290万;
(3)严卫生主持,面向海洋附着物清洗的水下清洗机器人系统关键技术研究,深圳市科技创新委员会重点项目(基20170014),2018-2020年,总经费300万。
在发明专利方面,团队拥有水下机器人设计、规划、控制等方向授权发明专利30余项,助力实现技术创新与工程实践相结合。代表性发明专利:
(1)严卫生、许晖、崔荣鑫等。一种游走混合的仿生刀锋腿和履带组合行走水下机器人及控制方法,ZL201710057675.3;
(2)严卫生、许晖、崔荣鑫等。一种游走混合的仿生刀锋腿和全向轮组合行走水下机器人及控制方法,ZL201710057655.6;
(3)崔荣鑫、严卫生等。一种自主水下航行器动态抗饱和俯仰角控制方法,ZL201510184979.7。
在研究成果方面,团队在水下作业机器人自主感知、路径规划、自主控制技术等方面形成了一系列研究成果,发表在《IEEE Transactions on Cybernetics》、《IEEE Transactions on Industrial Electronics》等顶级期刊上,并有多篇ESI高被引论文。
(1)在环境感知认知方面,团队成员提出了基于互信息的多自主水下作业机器人协同观测路径规划方法,并利用仿生机器鱼进行了实验验证,该项研究成果发表于《IEEE Transactions on Systems Man & Cybernetics-Systems》上,并进入了ESI 高被引论文数据库,图1 给出了对虚拟环境信息的估计结果。此外,团队针对水下图像识别与分类技术研究,提出了一种基于声学与视觉数据融合的端到端水下地形识别方法,该方法初步解决了环境干扰、成像质量差等问题。

图1 机器鱼协同观测实验
(2)自主决策及规划方面,针对海洋环境中目标搜索中的自主决策问题,团队成员提出了一种基于贝叶斯估计的多智能体搜索方法,机器人搜索航迹如图2所示,该成果发表在《IEEE Transactions on Cybernetics》上。此外,针对非完整动态约束以及动力学非线性特性,团队成员利用神经网络逼近机器人的非完整约束,提出了一种基于快速随机生成树(RRT)的机器人运动规划方法,实现了运动约束下的机器人渐近最优路径规划,如图3所示。该项研究成果发表在《IEEE Transactions on Industrial Electronics》上。
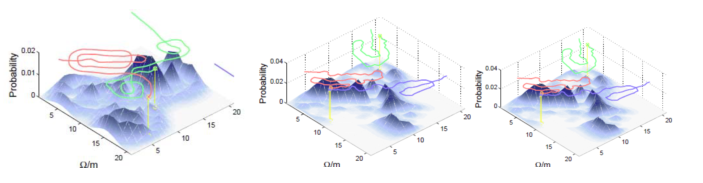
图2 贝叶斯估计框架下的自主决策航迹规划结果
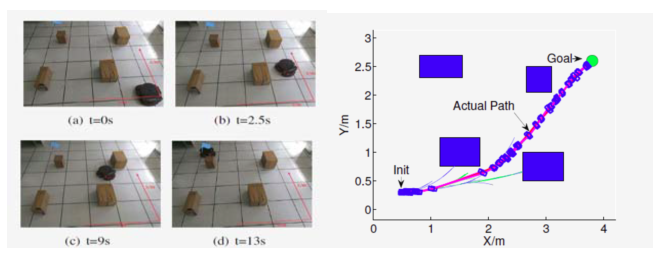
图3 运动约束下的RRT算法实验
(3)在运动控制方面,针对未知干扰和非线性不确定性,团队提出了一种未知干扰和模型不确定下的水下机器人积分滑模控制方法,应用在一型水下作业机器人的控制上,如图4所示,该项成果2017年发表于《IEEE Transactions on Industrial Electronics》;针对非线性约束,提出基于强化学习的AUV自适应控制算法,该成果发表于《IEEE Transactions on Systems, Man, and Cybernetics:Systems》;针对航行器输入受限问题,提出了输入饱和下海洋航行器姿态自适应控制方法,发表在《Ocean Engineering》上,这两篇论文均进入了ESI高被引论文数据库。
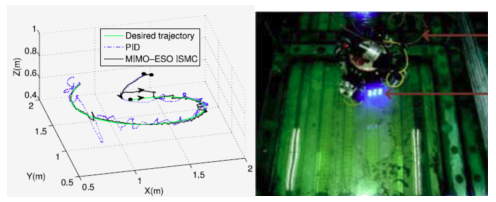
图4 水下机器人积分滑模控制实验
(4)在样机研制方面,已研制了4型水下作业机器人样机。受中船重工716所委托,团队研制了一型多功能水下作业机器人,如图5所示。通过模块化设计,该水下作业机器人可以搭载声纳等传感器进行海洋环境感知任务,也可以搭载机械手进行水下作业等任务。
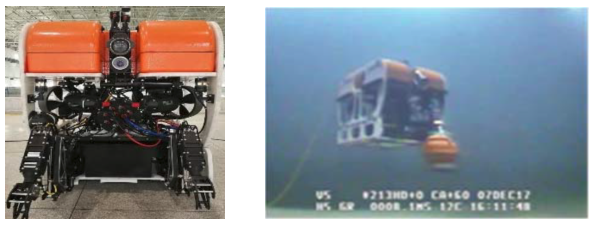
图5 研制的多功能自主水下机器人及水下信标抓取实验
团队在科技部863 重大项目的支持下,研制了50 公斤级便携式自主水下作业机器人(图6),获得了第十八届中国国际工业博览会高校展区特等奖,并在中央电视台等多家媒体进行了报道。此外,团队研制的其它水下作业机器人平台见图7所示。

图6 50 公斤级便携式自主水下机器人
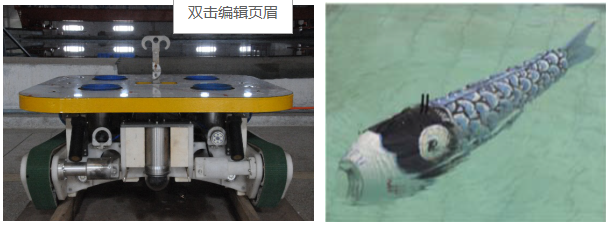
图7 团队研制的其它民用水下作业机器人平台
三、产业化内容
针对海洋资源开发与利用、海洋装备的检测和维护、水下文化遗产勘探与保护、海洋牧场建设与生物捕捞等需求,着力开展海洋结构物检测与清洗的水下作业机器人、水下文化遗产勘探机器人、海洋牧场建设与日常维护应用的水下作业机器人的产业化,推动我国水下作业机器人的应用发展,形成相应产业链,增强我国海洋装备的国际竞争力。
四、往期业绩(包括和企业合作、所获荣誉、专利拥有情况等)
(1)在“十五”与“十一五”先后与昆明船舶设备集团有限公司等多家企业合作,研制成功了三型重型远程自主水下航行器,团队负责人为副总设计师,负责导航、控制和电路系统的研制工作,先后荣获国家技术发明二等奖一项(2015年)、国家科技进步二等奖两项(2010年和2005年)。
(2)在“十二五”期间与西安天和防务技术股份有限公司联合承担了863计划海洋领域项目“50公斤级便携式自主水下观测系统(AUV)工程化技术”。团队负责人作为总设计师,成功研制了我国第一条具有完全知识产权的微小型自主水下机器人,并实现了产业化生产。2016年,得到了中央电视台、凤凰卫视台、陕西电视台、人民网等国内多家媒体的广泛报道, 并于2017年获第十八届中国国际工业博览会高校展区特等奖、中国产学研合作创新成果一等奖。


